
Aura of Puppetsin nukketeatteritaiteilijat Valtteri Alanen ja Aati Hanikka Cornellin yliopiston fysiikan laitoksella Itai Cohenin tutkimusryhmän vieraina.
Nukenkäsittelytekniikat perustuvat pitkälti siihen, mitkä ovat käsiteltävänä olevien nukkien materiaalit ja rakenteet – vai perustuvatko nukkien materiaalit ja rakenteet sittenkin siihen, miten nukkeja kussakin kulttuurissa, ajassa tai paikassa on tavattu pääasiassa käsitellä? Joka tapauksessa niin nukke materiaaleineen ja valmistusmenetelmineen kuin nukenkäsittelijä tekniikoineen ja taitoineen ovat riippuvuussuhteessa paitsi toisiinsa, myös siihen vallitsevaan teknologiseen ja kulttuuriseen ympäristöön, jossa sattuvat olemaan.
Tässä tekstissä esittelemme löytöjämme nukenkäsittelytekniikoiden suhteen. Olemme keränneet ajatukset ja oivallukset vierailullamme Cornellin yliopiston sovelletun fysiikan laitoksella Aura of Puppetsin ja Taiteen edistämiskeskuksen tukemana keväällä 2022. Vierailimme tohtori Itai Cohenin tutkimusryhmän luona, tutustuen viikon aikana mitä erilaismpiin laboratorioihin, koeympäristöihin ja tieteentekijöihin. Iloksemme saimme myös käydä dialogia fyysikoiden kanssa tieteestä, taiteesta, nukketeatterista ja fysiikasta.
Yksi viikon ehdottomista kohokohdista oli nukenkäsittelyn alkeet -työpaja, jonka ohjasimme professori Cohenin johtamille fyysikoille. Vierailu oli osa taiteellista prosessia, joka huipentuu Nano Steps -teoksen ensi-iltaan Helsingin Kaupunginteatterin Nykyesityksen näyttämöllä elokuussa 2023. Tässä vaiheessa haluamme kuitenkin – vapaan tiedonlevityksen ja avoimen ideoiden jakamisen hengessä – esitellä jo tähän mennessä löytämiämme ja unelmoimiamme nukketeatterillisia mahdollisuuksia, joita nykyinen fysiikan tieteellinen tuntemus meille nukketeatterin tekijöille avaa. Kaikki tästä tekstistä löytyvä ei millään tule mahtumaan yhden taiteiljaryhmän repertuaariin saatikka yhteen esitykseen. Onkin siis meidän kaikkien nukketeatteritaiteiljoiden etu, että tässä tekstissä esitellyt kokeilumahdollisuudet, ideat ja hähmäiset unelmat löytävät tiensä mahdollisimman monen taiteilijan tietoisuuteen. Avoimesti ajatuksiamme jakamalla toivomme edistävämme koko taiteenlajin jatkuvaa kehitystä, ajassa kiinni pysymistä sekä sen elinvoimaisuutta.
Omat mielenkiinnon kohteemme ja ammatilliset erityisosaamisemme näkyvät tekstissä – esimerkiksi Valtterin kirjoittama osuus akustisesta manipulaatiosta on suhteellisen pitkä ja Aatin historia paperilennokkien parissa siivittää origamien mekaniikkaa ruotivaa osuutta. Olemme kuitenkin pyrkineet antamaan tilaa kaikille kohtaamillemme soveltavien fyysikoiden käyttämille nukenkäsittelytekniikoille, onhan tekstin tarkoitus valaista mahdollisuuksia koko taidekentälle.
Käytämme fyysikoiden englanniksi käyttämiä termejä vapaasti suomennettuina nukke-suomeksi. Englanninkieliset sanan alkuperät löytyvät alaviitteistä.
Tulevaisuuden nukenkäsittelytekniikoita nykypäivän huippuyliopiston fysiikan laboratoriossa
Näin 2020-luvun alkupuolella elämme maailmassa, jossa mitä ihmeellisimpiä asioita käsitellään mitä kummallisimmin menetelmin – kodin valaistusta manipuloidaan internetin välityksellä vaikka ulkomailta ja laser ohjastaa robotti-imuria tarkemmin kuin marionetin naru nukkea konsanaan. Toki robotti-imuri toimii niin hurmaavan fiksusti (silloin kun onnistuu toimimaan hurmaavan fiksusti) siksi, että sillä on jo jonkinlaista tekoälyä käytettävissään.
Tässä onkin tulevaisuuden nukketeatterin (ja jo nykyajan nukketeatterin) kannalta oleellisia ja kutkuttavia kysymyksiä: Missä suhteessa teatterinukke ja robotti ovat toisiinsa? Onko robotti itseasiassa todella pitkälle kehittynyt teatterinukke, vaiko jo tyystin jotain muuta? Missä kohtaa tekoäly tulisi ymmärtää itsenäiseksi toimijaksi, ja missä vielä marionetin naruihin rinnastettavaksi, etukäteen ohjelmoitujen monimutkaisten toimintamallien ja riippuvuuksien kautta ohjattavaksi nuketusmenetelmäksi?
Vierailulla Yhdysvaltoihin löysimme Cornellin yliopiston Fysiikan laitokselta yllättävän nukketeatterin asiantuntijan. Tai oikeastaan hän on fysiikan ja tieteen asiantuntija, joka mitä ilmeisimmin hallitsee vertauskuvallisen ja rinnastavan ajattelun sujuvaakin sujuvammin, niin nopeasti professori Cohen sai kiinni nukketeatterin mahdollisuuksia koskevista pohdinnoistamme.1
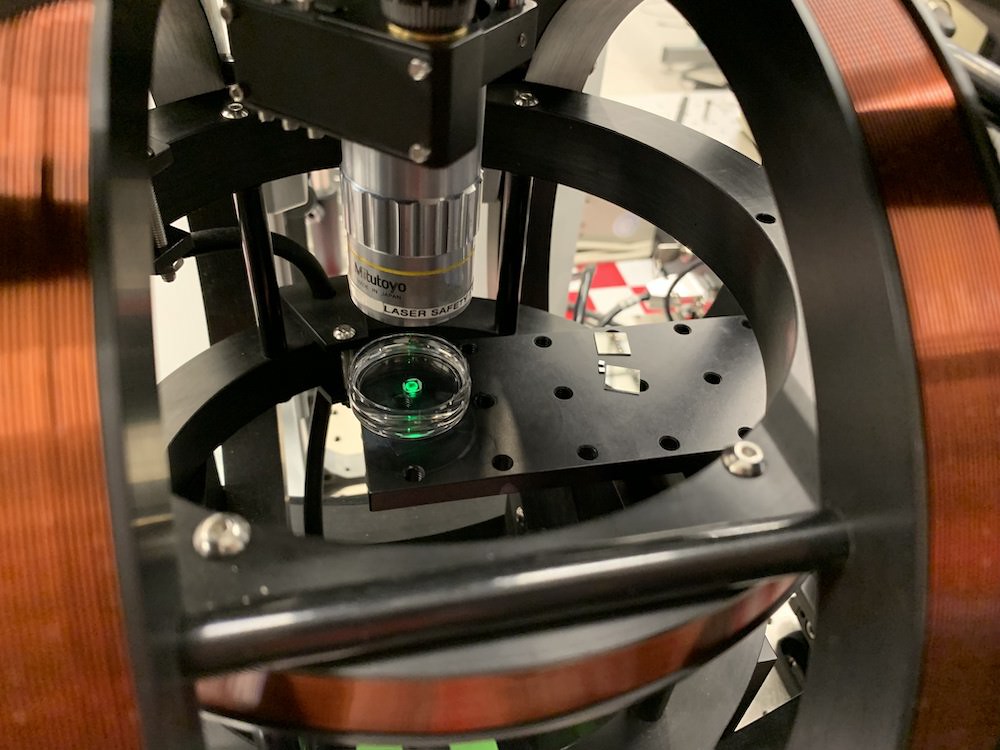
Prof. Itai Cohenin mukaan robotin ja nuken oleellinen ero on ohjautuvuudessa: robotilla on riittävästi itsenäistä päätöksentekokykyä, ts. itseohjautuvuutta, että se kykenee suoriutumaan vähintään perustason tehtävistä itsenäisesti. Vierailullamme Cornellin yliopistoon saimme tutustua kahteen erilaiseen mikroskooppiseen robottiin, jotka täyttivät tämän itseohjautuvuuden ehdon eri tavoin ja eri tasoisesti. Ensimmäinen näkemämme origaminanorobotti toimi tarkan laserohjauksen varassa: kun laservalolla osoitti robotin etupuolen virtapiiriä, nykäisi se itseään yhden askeleen eteenpäin. Kun laserilla osoitti takapuolen virtapiiriä, teki robotti saman toimituksen mutta päinvastaiseen suuntaan.2 Jatkuvan kävelyliikkeen aikaansaamiseksi nukettajan, eli robottia ohjaavan fyysikon, tuli siis toistuvasti vilkuttaa laservaloa tiettyyn kohtaan robotissa. Joka vilkahduksella hahmo ottaa yhden askeleen.
Kiinnostavaa tämän kävelevän origaminanorobotin nukkeudessa on myös havainto siitä, että kyseisellä robotilla ei ole sisäistä virtalähdettä. Kaikkeen liikkumiseen tarvitsemansa energian se ottaa suoraan samasta laservalosta, jolla sitä ohjataan. Vastaavasti perinteinen marionettikin voittaa painovoiman vain sillä lihasvoimalla, joka nukenkäsittelijän lihaksistosta ristikon ja narun kautta nukelle välittyy. Professori Cohen totesikin meille ensin esitellyn robotin olevan selvästi marionetti – laservalo vain oli korvannut narut.
Toinen kohtaamamme robotti oli jo selvästi robottisempi. Cohenin tutkimusryhmän seuraavan sukupolven kävelevä origamimikrorobotti toimi jo vain yksinkertaiseen värivaloon reagoimalla: robottiin oli ohjelmoitu kaksi eri kävelysuuntaa, joiden väliltä robotti valitsi sen perusteella minkä väristä valoa sen virtapiirille saapui. Esimerkiksi sinisessä valaistuksessa eteen-, punaisessa taaksepäin. Tälle robotille ei tarvinnut antaa impulssia joka askeleella, vaan se ymmärsi valon värin perusteella saaneensa tehtävän: “kävele eteen” tai “kävele taakse”, ja tuota tehtävää se uskollisesti suoritti kunnes valo kytkettiin pois päältä tai vaihtoi väriä. Tämän esimerkin robotti on siis jo askeleen verran itsenäisempi kuin edeltäjänsä. Sillä on jo rahtunen enemmän Professori Cohenin peräänkuuluttamaa itseohjautuvuutta: (etukäteen ohjelmoituun toimintaan perustuvaa) tilanteeseen sopeutuvaa päätöksenteko- ja toimintakykyä.3
Jonkin asteinen itseohjautuvuus vaikuttaa meistä kelpo mittarilta robotin ja nuken toisistaan erottamiseksi: voimme kuvitella teknologisten hahmojen janan, jonka toisessa päässä on täydellä tekoälyllä varustettu robotti, joka kykenee toimimaan täysin ihmisohjauksesta itsenäisenä. Janan toisessa päässä taas on perinteinen teatterinukke, joka ei liikahda milliäkään, ellei nukenkäsittelijä ole sitä välittömällä otteella animoimassa. Cohenin tutkimusryhmän robotit ovat hieman eri kohdissa jossain tämän janan keskivaiheilla. Molemmat tarvitsevat kävelläkseen nukenkäsittelijän (tai fyysikon) antaman valoimpulssin, mutta toinen roboteista tarvitsee impulssin vielä jokaiselle askeleelle erikseen. Se on siis janalla lähempänä nukkea kuin yhdellä valoimpulssilla jatkuvasti kävelevä aisaparinsa.4 Kumpikaan origaminanoroboteista ei kuitenkaan ole täysin robottien päädyssä: niiltä esimerkiksi puuttuu sisäinen voimanlähde, joka itsenäistäisi niitä huomattavasti ihmisistä, joita ne vielä tarvitsevat liikkuakseen. Liikevoiman välitön lähde on nähdäksemme itseohjautuvuuden kannalta yhtä tärkeä mittari kuin päätöksentekokykykin: ilman voimaa suorittaa päätettyjä toimintoja, ei kyvyllä tehdä päätöksiä ole paljoakaan merkitystä.
Ääniaallot
Oletko koskaan kokenut, että ympärilläsi on jonkinlaisen energian muodostama, hiukan aaltoileva voimakenttä? Moni nukketeatteritaiteilija on toki tottunut suunnistamaan elottoman elollistamisen ynnä muiden mahdottomuuksien maastoissa, mutta siitä huolimatta olimme pudota tuolilta, kun tajusimme että sovelletun fysiikan laboratorion käsittelemässä aaltoilevassa voimakentässä ei ole kyse subjektiivisesta psykomagiasta, tai metaforisesta puheesta. Kyse on mittarein, aistein, ja ihan paljain silmin (tai mikroskoopin linssin) avulla todennettavissa ja hyödynnettävissä olevista ilmiöistä ja voimista!
Jos siis olet kokenut, että ympärilläsi on jonkinlaisen energian muodostama, hiukan aaltoileva voimakenttä, et ole ollut väärässä. Voimakenttää, johon viittaamme, sanotaan arkikielellä ilmakehäksi. Aaltoilu, johon viittaamme, on tietysti ilmanpaineen jatkuvaa vaihtelua, joka tietyllä taajuudella toistuessaan voidaan havaita esimerkiksi äänenä – jos paineen vaihtelu on riittävän voimakasta voi sen havaita myös esimerkiksi tuntoaistimuksena. Akustinen nukenkäsittely on mahdollista juuri saman ilmiön ansiosta, jonka tunnet, kun konsertin bassotaajuudet tuntuvat vatsassa, tai tärisyttävät istuinta: kaiuttimesta säteilevät ääniaallot kohtaavat vatsasi tai istuimet, aiheuttaen niissä havaittavaa liikettä. Soivan nuotin ja istuimen eri osien harmonisista ominaisuuksista suhteesta riippuen eri osat istuimesta värisevät eri tavoin. Riittävästi aikaa voimakkaiden subwoofereiden5 lähistöllä viettäneet saattavat jopa tietää eri sisäelintensä harmonisia moodeja: Valtterin maksa esimerkiksi resonoi E-1:n kanssa. Noin 40:nen Hz ääniaallon aallonpituuden6 ja kyseisen maksan koon7 välillä on siis oltava yksinkertainen matemaattinen kerrannaissuhde, joka saa maksan värisemään kuin kitaran kaikukoppa konsanaan, kunhan se kohtaa oikealla taajuudella soivan ääniaallon!
No mutta, se Valtterin maksasta. Oleellista tässä esimerkissä on se, miten se havainnollistaa ääniaaltojen fyysistä ulottuvuutta. Vaikka ääni usein arkikokemuksessa tuntuukin immateriaaliselta, lähes hengelliseltä aistimukselta – sen välitöntä aiheuttajaa ei voi nähdä, maistaa, haistaa tai koskettaa kuin vain hyvin äärimmäisissä tapauksissa – on se tosiasiassa kuitenkin fyysinen, materiaalien välisissä voimissa konkretisoituva ilmiö.
Jos pohdimme kuuloaistimme toimintaa oikein pitkälle, voimme ajatella, että sehän ei oikeastaan ole oma erillinen aistinsa ollenkaan. Ihmisen korvassa on nimittäin jonkin mystisen kuuloelimen sijaan vain erittäin pitkälle erikoistunut tuntoaistimuksen muoto: ääniaalto, joka saapuu korvaan liikuttaa tärykalvoa, eli erittäin ohutta ihon palaa joka tukkii korvakäytävän pohjan. Siitä tärykalvon taakse välittyvä paineenvaihtelu taas heiluttelee kuulokarvoja, (jotka ovat nimensä mukaisesti pienen pieniä eri taajuuksiin erikoistuneita karvoja) joihin kytkeytyneet hermoradat kuljettavat tiedon ääniaallon muodosta eteenpäin aivoihin ja lopulta ihmisolennon tietoiseen kokemukseen. Ääniaistimus saapuu siis tietoisuutemme samasta lähteestä kuin muutkin tuntoaistimukset: kehon pinnoilta, ihon ja karvojen kohtaamaan paineenvaihtelun tuloksena.
Koska ääniaalto kykenee työntämään tärykalvoa niin paljon, että sen takana syntyy ääniaistimus, on siis oikeastaan ihan järkeenkäypää, että kun sopivan kevyt kappale kohtaa sopivan aallonpituuden, voimakkuuden ja toistuvuuden omaavan ääniaallokon, myös se lopulta siirtyy hiukan johonkin suuntaan. Kuten tohtori Zexi Liang meille demonstroi Cornellin yliopistolla, on tätä ilmiötä mahdollista käyttää esineiden hallittuun ja hallitsemattomaan käsittelyyn. Selvittääksemme miten tämä käytännössä onnistuu, on meidän avattava vielä kaksi varsin teknistä käsitettä: seisova aalto ja vaihesiirtymä.
Seisova aalto
Akustisen manipulaation perustyökalu on ns. seisova aalto. Hifi-kotistereoita harrastaneet saattavat tuntea saman ilmiön nimellä “huonemoodi”. Huonemoodissa on kyse huoneelle ominaisesta resonoivasta taajuudesta. Jokainen huonehan on periaatteessa iso kaikukoppa, joka nyt vain sattuu olemaan myös ihmisolennon toimintaympäristö. Jos huoneen seinät ovat paljaat, ja kaikukoppa näin erityisen tehokas, saattaa siinä oleskeleva ihminen huomata esimerkiksi musiikkia kuunnellessaan tai laulaessaan, että tietyt nuotit soivat huomattavasti voimakkaammin, ja jäävät jopa pidemmäksi aikaa kaikumaan kuin muut nuotit. Kyseiset nuotit ovat harmonisessa suhteessa huoneelle ominaiseen taajuuteen8, kuten E-1 Valtterin maksaan, ja näin ollen vahvistavat itseään huoneessa kaikuessaan muita nuotteja tehokkaammin.
Kun melodianpätkän lurauttamisen sijasta etsimme nuotin, joka resonoi tilassa poikkeuksellisen hyvin ja jatkamme tuon saman nuotin tuottamista voimme synnyttää huoneeseen ns. seisovan aallon. Tilaan syntyy akustisesti puolittain vakaa tila, jossa tietyissä kohtaa huonetta ilma liikkuu ääniaallon kanssa erityisen paljon, ja toisissa paikoissa pysyy täysin paikoillaan. Näitä pisteitä kutsutaan solmukohdiksi.9 Riittävän matalilla taajuuksilla ilmiön voi todeta korvien lisäksi jälleen tuntoaistin avulla: kehnosti akustoidulla tanssilattialla on pisteitä joissa tietyt bassonuotit kuuluvat ja tuntuvat kehossa erityisen voimakkaasti, kun taas toisissa kohdissa bassotaajuudet katoavat kokonaan.
Nukenkäsittelijän näkökulmasta seisovassa aallossa kyse on kaiuttimin luodusta vakaasta akustisen energian kentästä: nukkea ympäröivä aaltoileva voimakenttä, esimerkiksi ilma10, saatetaan paikallisesti hallittuun resonoivaan tilaan – seisovaksi aallokoksi. Tuota resonaatiota muokkaamalla voimme vaikuttaa voimakentässä oleviin kappaleisiin – ja näin ollen kirjaimellisesti nukettaa noita kappaleita äänen voimalla.
Vaihesiirtymä
Jotta akustisessa voimakentässämme nyt killuva kappale saataisiin vietyä vielä hallittuun liikkeeseen, pitää nukettajan manipuloida seisovan aallon vaihetta. Vaihesiirtymässä on kaikessa yksinkertaisuudessaan kyse siitä, että siirrämme seisovan aallon solmukohtia huoneessamme haluttuihin paikkoihin.
Aallon vaihe tarkoittaa kirjaimellisesti kohtaa jossa toistuva ääniaalto tietyllä hetkellä on kiertoaan: onko ilmanpaineen vaihtuminen juuri nyt huipussaan, aallonpohjassaan, vaiko jossain siltä väliltä. Useimmissa ääntä tuottavissa laitteissa, kuten laboratorioiden ja sähköinsinöörien signaaligeneraattoreissa, musiikkisyntetisaattorien oskillaattoreissa (jotka ovat oikeastaan vain esteettisesti orientoituneita signaaligeneraattoreita11) ja äänen käsittelyyn erikoistuneissa ohjelmistoissa on asetus, jopa fyysinen nuppi, jolla tuotetun ääniaallon vaihetta voi siirtää. Kun vaihetta siirretään samalla kun laite tuottaa ääntä, siirtyy vaihe luonnollisesti myös akustisessa kentässä. Kun vaihe siirtyy akustisessa kentässä, joka on muodostanut seisovan aallon, siirtyvät seisovan aallon solmukohdat vaihesiirtymän mukaisesti samalla kun akustinen kenttä muuten pysyy vakaana.12

Nukke liikuttuu äänestä
Kun akustinen kenttä asettuu seisovaan aaltoon, syntyy koko kentän alueella kahdenlaisia nukenkäsittelyn kannalta olennaisia alueita tai pisteitä: Seisovan aallon solmukohdat, joissa akustinen liike on siis joko poikkeuksellisen suurta tai pientä, vaikuttavat nukkeihin eri tavoin. Poikkeuksellisen suuren liikkeen alueilla nuket tärisevät, hyppelehtivät ja lopulta siirtyvät toisaalle. Ne kohtaavat jatkuvasti johonkin suuntaan työntäviä ääniaaltoja, ja niinpä ne nukettuvat.
Toisissa solmukohdissa, joissa ääni ei kuulu ollenkaan, eli akustinen energia loistaa poissaolollaan, nuket taas asettuvat lepoon, ja pysyvät paikallaan. Sopivan tiukassa aallokossa nukke saattaa hypähdellä vienosti edestakaisin, kun suuren akustisen liikkeen solmukohdat ovat kaikilta puolilta riittävän lähellä nukkea itseään. Suuren liikkeen solmukohdissa liike on pääsääntöisesti kaoottista. Hallittu nuken liike saavutetaankin hyödyntämällä seisovan aallon hiljaisia solmukohtia ja vaihesiirtymää: Kun nukke on asettunut hiljaiseen solmukohtaan, alkaa nukettaja siirtämään akustisen kentän vaihetta. Aina kun suuren energian solmukohta siirtyy nuken luo, liikahtaa se eteenpäin ja asettuu yleensä takaisin (nyt siirtyneeseen) hiljaiseen solmukohtaan. Kun vaihetta näin siirretään yhtäjaksoisesti, liikkuu nukke akustisen kentän mukana suhteellisen hallitusti.
Magneettikentät
Magneettisessa nukenkäsittelyssä liikutaan pitkälti samankaltaisissa vesissä kuin akustisen manipulaation kanssa: paljaalle silmälle näkymättömän ja kädelle tuntemattoman voimakentän soveltamisessa nukenkäsittelyyn. Magneettista manipulaatiota muistamme joskus nukketeatteriesityksissä nähneemmekin: jääkaappimagneetit ovat mitä oivallisimpia hahmoja, kun jääkaapin sisällä oleva nukettaja käsittelee niitä voimakkaalla magneetilla!
Mutta magneettiset manipulaation menetelmät mahdollistavat muutakin. Erityisesti sähkömagneettisissa ilmiöissä, ja magneetein ohjelmoiduissa nukeissa on runsaasti kehityspotentiaalia. Seuraavaksi esittelemme lyhyesti sähkömagneettien ja itse-kokoontuvien nukkien mahdollisuuksia.
Sähkömagnetismi
Kun tohtorikoulutettava Alice Zhang vei meidät Cornellin kellarissa sijaitsevaan laboratorioon, jossa hän tutki mikrorobottien liikettä ohjatuissa magneettikentissä, kohtasimme varsin vaikuttavan mutta toimintaperiaatteeltaan yksinkertaisen laitteen: Helmholtzin kelan. Kyseessä on kaksi sähköjohdosta käännettyä silmukkaa, joilla on sama säde, sama keskiakseli, ja joiden välinen etäisyys on sama kuin niiden säde. Tarkemmin Helmholtzin kelan tekniikkaa esitellään suomeksi esimerkiksi Maarit Peltomäen opinnäytetyössä Turun Ammattikorkeakoululle.13
Helmholzin kelassa erityistä on se, että kun keloihin johdetaan sähkövirta, syntyy niiden väliin ns. homogeeninen magneettikenttä, jonka voimakkuus riippuu kelaan johdetun sähkövirran voimakkuudesta. Kun kelojen välissä olevat magnetisoidut kappaleet alistuvat magneettikentälle, ne asettuvat samansuuntaisesti pohjois- ja etelänapojensa mukaan. Tämä toistuu samalla tavalla riippumatta siitä, missä kohtaa kappaleet magneettikentällä sattuvat sijaitsemaan.
Tohtorikoulutettava Zhangin koejärjestelyissä käämejä oli kolme kappaletta, kolmella eri tila-akselilla. Kuten lukija ehkä jo kuvittelee, kolmella akselilla tapahtuva magneettikentän kiertäminen alkaa jo käydä nukenkäsittelystä! Kun x-akselilla olevaan kelaan johdetaan sähkövirta, kääntyy kentässä oleva kestomagneetti x-akselin suuntaisesti. Kun y-akselilla tai z-akselilla olevaan kelaan johdetaan virta, kääntyy magneetti aina kyseisen akselin suuntaiseksi. Vaan mitä tapahtuu kun virta johdetaan kahteen kelaan yhtäaikaisesti, vaihtelevalla voimalla? Magneetti hakeutuu johonkin kahden kelan akselien välillä olevaan asentoon, kulmaan jonka määrittää keloissa olevien virtojen voimakkuuksien ero!
Nukenkäsittelijä voi siis hallitusti vaihtaa nuken magnetisoitujen osien suuntaa. Helmholzin kelan sisällä esimerkiksi usean hahmon synkronoitu liike näyttää varsin maagiselta. Toisen fyysikoiden jo toteuttaman esimerkin mukaan nuken voi esimerkiksi suunnitella niin lapakätiseksi14, että sen voi saada liikkumaan tilassa aiheuttamalla sen käsiin riittävän suuren soutuliikkeen. Nuken kättä, joka toimii siis myös airon lapana, käännetään magneettikentän avulla niin, että nukke alkaa tehdä säännöllistä soutuliikettä. Sopivassa aineessa kelluva nukke alkaa näin kirjaimellisesti soutamaan – tai huopaamaan – itseään nukenkäsittelijän ohjastamaan suuntaan.
Romupihojen marionetit
Sähkömagnetismi tarjoaa myös toisen jo kuvittelemamme vaihtoehdon nukenkäsittelyyn. Tätäkin tekniikkaa kyllä käytetään toisenlaisessa tahattomassa marionettiesityksessä, mutta teatterissa ainakaan allekirjoittaneet eivät ole vielä tähän törmänneet. Erittäin voimakkaita sähkömagneetteja käytetään esimerkiksi romuraudan siirtelyyn jätteenkäsittelylaitoksissa. Kuvitellaanpa autonromu, johon iso metallikiekko laskeutuu kiinni. Sitten, ilman sen kummempia kouria, autonromu nouseekin metallikiekon vetämänä ylös, ja siirtyy romumetallikasan ylle. Ja sitten, ilman sen suurempaa varoittavaa liikettä tipahtaa irti isosta metallikiekosta. Tavallista, päälle ja pois kytkettävää sähkömagneettia käytetään jo pitkälti teollisuuden marionettina. Vaan millaisia tuloksia päälle ja pois käännettävillä, esityksen edetessä eri tavoin kytkettävillä narutuksilla voisi saavuttaa teatterissa? Voisiko nukke naruttua uudelleen pois ja päälle kytkettävien sähkömagneettien välillä?
Magneettilevitaatio
Magnetismi mahdollistaa myös levitaation. Tätäkin manipulaatiota on jo kehitetty teollisen mittakaavan sovelluksissa: magneettilevitoivat junat ovat jo arkipäivää maailmalla15, vaikka VR ei vielä kiidätäkään matkalaisia Turusta Helsinkiin magneettien varassa levitoivalla junalla.
Nukketeatterissa magneettilevitaatio voisi ehkä toimia seuraavasti: otetaan nukeksi kestomagneetti, ja nuketuskepiksi sähkömagneetti, joka luo kestomagneettia hylkivän magneettikentän. Luodun magneettikentän on oltava riittävän laaja, jotta levitoiva kestomagneettinukke ei putoa alustaltaan. Voi myös olla, että alustan muoto vaatii muitakin ominaisuuksia, kuten kaarevuutta. Emme ole kokeilleet tätä hypoteesia. Joka tapauksessa levitaatioalustaa manipuloimalla nukkea pitäisi pystyä kuljettamaan leijuttamalla. Alustaa voidaan manipuloida mekaanisesti siirtämällä tai rakentamalla laajan sähkömagneettisen kentän, jonka osia voidaan manipuloida niin, että levitoiva kestomagneetti leijuu kentän sisällä.
Itsejärjestyvä 16 nukke
Sähkömagneettien lisäksi ihan tavallisilla kestomagneeteilla, kuten jääkaappimagneeteilla, on nukketeatterillisesti alihyödynnettyjä käyttömahdollisuuksia. Cohenin tutkimusryhmän laboratoriossa tutkittiin nanomittakaavassa17 magneettien avulla tapahtuvaa materiaalien itsejärjestymistä18. Ilmiössä on periaatteessa kyse yksinkertaisesta ajatuksesta: otetaan tavoitteeksi haluttu muoto, vaikka kuutio, ja materiaali, vaikka paperiliuskat. Tuo muoto kasataan erillisistä kappaleista, joiden väliin asetetaan muodon kasassa pitäviä magneetteja. Esimerkiksi kuuden pienen magneetin yhdistelmällä, jossa napaisuudet on aseteltu eri yhdistelmiin, saavutetaan jo suuri määrä toisistaan poikkeavia magneettisia kontaktipisteitä.
Nyt kappaleet voidaan irrottaa toisistaan. Kun toisistaan irrallaan olevia kappaleita tärisytetään (esimerkiksi akustisesti manipuloimalla!) pyrkivät ne hyppelehtimään magneettien vetämänä takaisin yhteen. Kun magneettiset kiinnityspisteet ovat toisistaan eroavia, muistaa muoto itsensä, hakeutuen takaisin alkuperäiseen muotoonsa. Toisaalta, mikäli kiinnityspisteiden kuviot eivät magneettisesti eroa toisistaan suuresti, tai ovat lähtökohtaisesti suunniteltu samanlaisiksi, kokoaa muoto joka kerta itsensä eri asentoon kuin edellisellä kerralla, enemmän tai vähemmän sattumanvaraisesti.
Itsejärjestymistä tutkitaan myös sähkövirralla. Kyseessähän on sähkömagneettisen vuorovaikutuksen toinen ilmentymä: sähkö. Kun sähköä syötetään objektiin, objektin sähkömagneettinen varaus muuttuu, mikä saa objektit hakeutumaan toisensa luokse. Objektit joko järjestyvät jonoiksi, pareiksi, parviksi tai mahdollisesti alkavat kieppumaan toistensa ympäri. Nuketuksellisesta näkökulmasta kyseessä on etänuketus, jossa asiat tapahtuvat orgaanisesti ilman suurta kontrollia. Toisaalta kyseessä on transformaatio: materia järjestyy uudelleen. Tästä tieteenalasta julkaistaan tutkimustuloksia tauotta. Sitä sovelletaan erityisesti materiaalitutkimuksessa erilaisiin suspensioihin, joista lisää seuraavassa osassa!
Välisanat
Kiitos Aura of Puppetsin, Taiteen edistämiskeskuksen ja Cornellin yliopiston tuen, olemme tämän vuoden aikan päässeet avartamaan nukketeatterin tulevaisuutta luotaavia ajatuksiamme huomattavasti. Jatkuvasti uutta tietoa luova soveltavan fysiikan tutkimus tarjoaa nukketeatterille ehtymättömän varaston soveltamiskelpoisia ideoita, teknisistä ratkaisuista aina taidemuodon kokonaisvaltaiseen kehittämiseen.
Akustinen ja sähkömagneettinen manipulaatio ovat vasta tämän jäävuoren huippu. Seuraavassa osassa käsittelemme suspensioita ja origameja erityisesti nukenrakentamisen kannalta lupaavina, uutta liikemateriaalia luovina materiaaleina.
Viitteet
1 Emme kysyneet hänen nukketeatterimaustaan, mutta ainakin esitelmämme Muppetit saivat hänet hymyilemään!
2 Sama robotti esitellään artikkelissa: Miskin, M.Z., Cortese, A.J., Dorsey, K. et al. Electronically integrated, mass-manufactured, microscopic robots. Nature 584, 557–561 (2020). https://doi.org/10.1038/s41586-020-2626-9
3 Tämän kaltaista robottia kuvataan artikkelissa: Reynolds MF and others, ‘Microscopic Robots with Onboard Digital Control’ (2022) 7 Science Robotics
4 Professori Cohen puhuu lisää robottiensa nukketeatterillisista ulottuvuuksista vierailumme jälkeen julkaistussa artikkelissa: https://news.cornell.edu/stories/2022/09/brains-board-smart-microrobots-walk-autonomously
5 Bassotaajuuksiin erikoistunut kaiutin.
6 Noin 8,37 metriä.
7 Emme ole mitanneet.
8 Niiden aallonpituus on siis esimerkiksi neljäsosa kahden seinän välisestä etäisyydestä.
9 Englanniksi nodes.
10 Tai mikä tahansa välittäjäaine jossa paineaallot voivat vapaasti kulkea. Esimerkiksi vesi tai metallilevy voi toimia joidenkin materiaalien manipulaation välittäjäaineena paremmin.
11 Tohtori Zexi Lian jopa kertoi joidenkin laboratorioiden rahapulassa käyttävän syntetisaattoreita tarkkaan kalibroitujen laboratoriolaitteiden sijaan. Laadukkaimmat musiikkiliikkeissä myytävät oskillaattorit voivat ajaa myös laboratoriovälineiden asemaa.
12 Tarkempaa ja tieteellisempää akuustiikan perusilmiöden varten katso esim: Berg RE & Stork DG, The Physics of Sound (Prentice-Hall 1982), ilmaiseksi luettavissa: https://archive.org/details/physicsofsound00berg (noudettu 5.12.2022)
13 Peltomäki 2015 s.19-22.
14 Tarkoittaen hahmoa jolla on lapamaiset, airon lailla toimivat, raajat.
15 Japanissa kehitetään parhaillaan esimerkiksi uutta, magneettisesti levitoivaa versiota, maan ikonisesta shinkansen –luotijunaverkostosta: https://global.jr-central.co.jp/en/company/_pdf/superconducting_maglev.pdf
16 englanniksi self-assembly
17 Nukketeatterille innostavaa oli, että teknologiasta oli jo olemassa ihmismittakaavassa toimiva prototyyppi!
18 Niu, Ran, et al. ”Magnetic handshake materials as a scale-invariant platform for programmed self-assembly.” Proceedings of the National Academy of Sciences 116, no. 49 (2019): 24402-24407.
Lähteet
Berg RE & Stork DG, The Physics of Sound (Prentice-Hall 1982) https://archive.org/details/physicsofsound00berg Noudettu 5.12.2022
Central Japan Railway Company 2017: The Rewiev – Superconducting Maglev https://global.jr-central.co.jp/en/company/_pdf/superconducting_maglev.pdf Noudettu 30.11.2022
Chodos, A. (Ed.) 2009: This month in physics history: October 22, 2004: Discovery of Graphene, APS News 18(9):2,
www.aps.org/publications/apsnews/200910/physicshistory.cfm Noudettu 21.6.2022
Cornell Chronicle. Nutt, D. Brains on Board: Smart Microrobots Walk Autonomously. https://news.cornell.edu/stories/2022/09/brains-board-smart-microrobots-walk-autonomously Noudettu 5.12.2022
Miskin, M.Z., Cortese, A.J., Dorsey, K. et al. Electronically integrated, mass-manufactured, microscopic robots. Nature 584, 557–561 (2020). https://doi.org/10.1038/s41586-020-2626-9 Noudettu 27.6.2022
Niu, Ran, Chrisy Xiyu Du, Edward Esposito, Jakin Ng, Michael P. Brenner, Paul L. McEuen, and Itai Cohen. Magnetic handshake materials as a scale-invariant platform for programmed self-assembly. Proceedings of the National Academy of Sciences 116, no. 49 (2019): 24402-24407.
Peltomäki, Maarit 2015 Magnetometrien testauksessa käytettävän kelajärjestelmän validointi. Turun Ammattikorkeakoulu, Turku. https://urn.fi/URN:NBN:fi:amk-2015111016166 Noudettu 18.6.2022
Reynolds, M.F. et al. (2022) Microscopic robots with onboard digital control, Science Robotics, 7(70), p. eabq2296. Available at: https://doi.org/10.1126/scirobotics.abq2296. Noudettu 5.12.2022


